Lệnh điều khiển động cơ robot mBot
Hướng dẫn chi tiết lệnh điều khiển động cơ robot mBot
422- Mục đích sử dụng lệnh điều khiển động cơ trong robot mBot
- Các lệnh lập trình điều khiển động cơ robot mBot
1. Mục đích sử dụng lệnh điều khiển động cơ trong robot mBot
Việc sử dụng lệnh điều khiển động cơ trong robot mBot là cốt lõi để robot có thể di chuyển, quay đầu, tránh vật cản hoặc thực hiện các hành vi tự động. Dưới đây là lý do chi tiết tại sao cần dùng các lệnh này:
Giúp Robot Di Chuyển
mBot có 2 động cơ gắn với 2 bánh xe.
Muốn robot chạy tới, lùi, rẽ trái/phải → phải điều khiển tốc độ và chiều quay của từng động cơ.
Ví dụ:
Nếu cả hai động cơ quay cùng chiều, cùng tốc độ → robot đi thẳng.
Một động cơ dừng, một động cơ quay → robot quay vòng.
Tạo Ra Các Hành Vi Tự Động
Kết hợp điều khiển động cơ với cảm biến (vật cản, vạch đen, ánh sáng…) để tạo ra robot thông minh:
Robot tránh vật cản
Robot đi theo đường line
Robot quay đầu khi gặp tường
Điều Khiển Chính Xác và Linh Hoạt
Lệnh điều khiển động cơ cho phép:
Chạy nhanh / chậm (thay đổi tốc độ)
Quay đúng số vòng / góc (kết hợp mã hóa hoặc thời gian)
Điều khiển độc lập từng bên
Lập Trình Hành Vi Robot
Nếu không có lệnh điều khiển động cơ → robot sẽ đứng yên và không thể tương tác với môi trường.
Các lệnh này là nền tảng cho mọi bài toán robot, từ đơn giản đến phức tạp.
2. Các lệnh lập trình điều khiển động cơ robot mBot
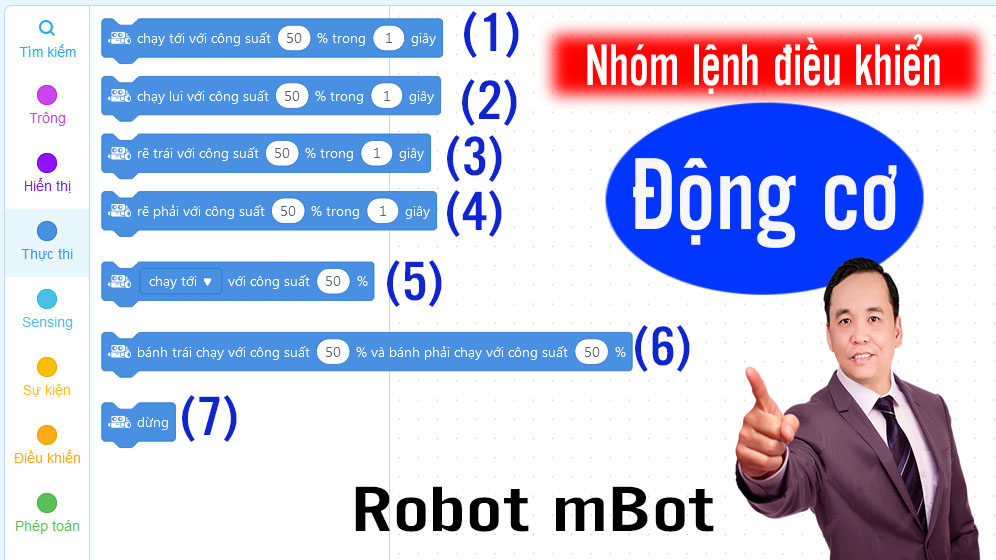
(1) Chạy tới với công suất 50% , trong 1 giây
(2) Chạy lui với công suất 50% , trong 1 giây
(3) Rẽ trái với công suất 50% , trong 1 giây
(4) Rẽ phải với công suất 50% , trong 1 giây
(5) [Chạy tới / Chạy lui / Rẽ trái / Rẽ phải ] với công suất 50%
(6) Bánh trái chạy với công suất 50% và bánh phải chạy với công suất 50%
(7) Dừng
Giải thích lệnh:
Thông tin màu đỏ là ta thay đổi lại cho phù hợp với kịch bản chạy.
Công suất càng lớn động cơ quay càng nhanh, thì robot chạy càng nhanh.
Trong 1 giây, động cơ robot quay trong vòng 1 giây, con số này có thể tăng lên, thì thời gian quay động cơ theo số giây quy định.
Tìm kiếm:
Hướng dẫn chi tiết lệnh điều khiển động cơ robot mBot
